{kind=link}
«Если машины производят все, что нам нужно, результат будет зависеть от того, как это распределяется. Каждый может наслаждаться жизнью полной роскоши и отдыха, только если машины, производящие блага, станут общим достоянием,либо большинство людей в конечном итоге станут катастрофически бедны, если владельцы машин будут выступать против перераспределения богатства… В реальности мы должны бояться не роботов, а капитализм».
Стивен Хокинг
Часть 1. Историческая справка. Появление роботов и роботизация мирового производства в 20 веке
Прообразы современных роботов появились ещё во времена античной Греции. На о. Фарос жители установили четыре женские позолоченные фигуры с автоматическим управлением, которые хорошо были видны издалека. Днём они отражали солнечный свет, а вечером горели как фонари.
Известно, что в XII веке арабский учёный и изобретатель Аль-Джазари создал лодку с механическими музыкантами, которые развлекали людей играми на музыкальных инструментах.
Около 1495 года Леонардо да Винчи создал чертёж человекоподобного робота-рыцаря. Не известно, пытался ли он собрать его, но рукописи, найденные в середине 20 века, свидетельствуют о том, что механический человек мог сидеть, двигать руками и головой и даже открывать забрало.
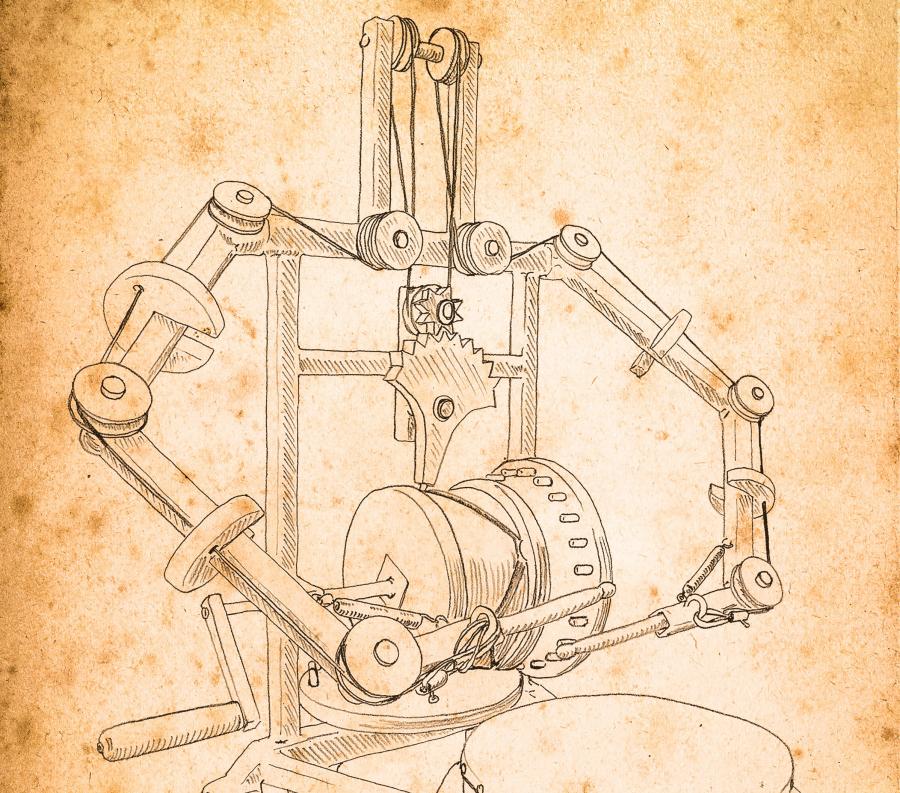
Чертёж робота Леонардо
В XVI—XVIII веках в Европе большое распространение получило конструирование «автоматонов». Это были заводные механизмы, похожие на человека или животных, которые были способны выполнять достаточно сложные движения конечностями.
В 1738 году Жак де Вокансон создал первого «андроида» – человекоподобное устройство, которое играло на флейте. Также французский механик и изобретатель прославился конструированием механических уточек, которые умели клевать корм.

Механическая утка Жака де Вокансона
Также до нас дошли сведения о русском инженере Пафнутии Чебышёве, который в конце XIX века придумал «стопоход» – механическую машину, которая обладала высокой проходимостью.
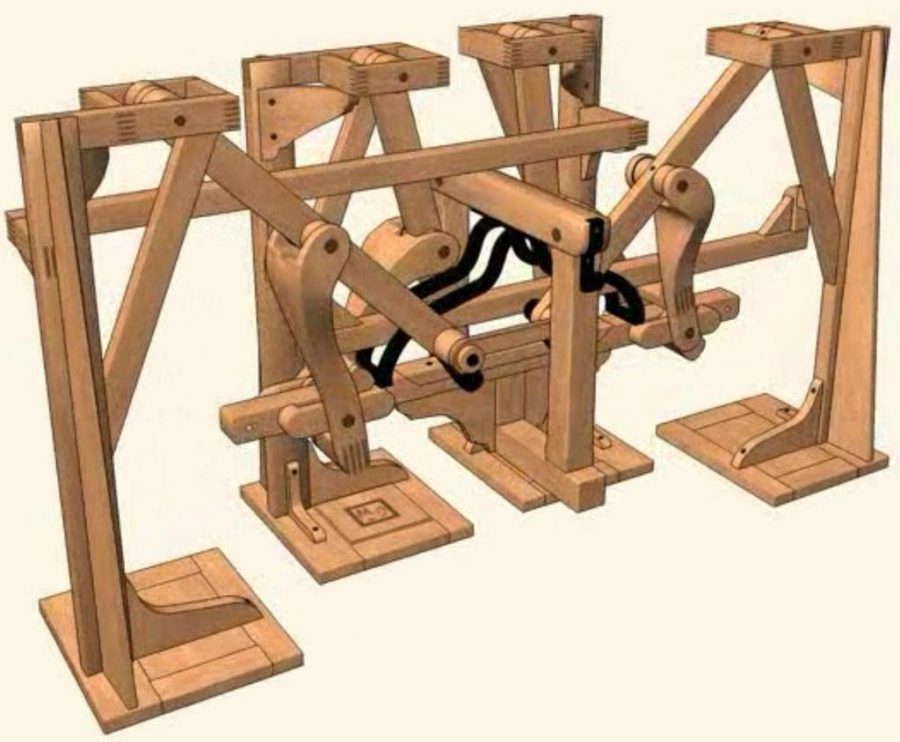
Стопоходящая машина Пафнутия Чебышева
Не мог остаться в стороне и Никола Тесла. Великий гений в 1898 году создал и продемонстрировал публике миниатюрное радиоуправляемое судно.
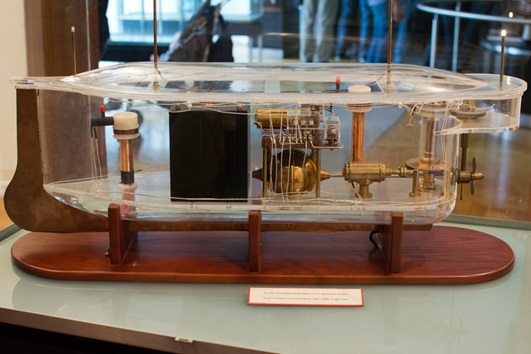
Радиоуправляемое судно Теслы
В 1920 году чешским писателем Карелом Чапеком и его братом Йозефом было придумано слово «робот». Это слово они впервые использовали в пьесе «Россумские универсальные роботы», которая рассказывает о событиях на фабрике, производящей “искусственных людей”. Пьеса была поставлена в 1921 году в Праге, имела большой успех и способствовала популяризации термина «робот».
На чешском языке слово robota означает «каторга», «тяжёлая работа», «барщина» (ср. болг. роб «раб»), а в русских переводах тогда использовали слово «работарь».
Интерес к роботам возрастал. В 1927 году американский инженер Дж. Уэнсли сконструировал управляемого голосом робота «Мистера Телевокса», внешне походившего на человека, который был способен выполнять элементарные голосовые команды. Этот робот стал экспонатом на Всемирной выставке в Нью-Йорке. В 1928 году на выставке Британской ассоциации инженеров по моделированию посетителей приветствовал робот «Эрик». В том же году под руководством доктора Нисимуры Макоты создаётся первый японский робот – «Естествоиспытатель», способный с помощью электропривода двигать руками и головой. Впоследствии этого андроида стали считать родоначальником роботостроения Японии.
В 1936 году был создан первый советский робот В2М. Московский школьник Вадим Мацкевич соорудил андроида и за это был удостоен диплома Всемирной выставки в Париже в 1937 году. В.В. Мацкевич впоследствии стал кандидатом технических наук, автором многих научно-популярных трудов и книг.
С начала 30-х годов появляются конструкции, внешне напоминающие человекоподобные существа, способные выполнять простейшие движения рук и воспроизводить фразы по команде человека. Имеются сведения, что в те годы роботов производили преимущественно компания «Вестингауз», некоторые немецкие и голландские инженеры в целях рекламы.
1936 год был поворотным в истории развития науки и техники. Английский математик Алан Мотисон Тьюринг ввёл концепцию «абстрактной вычислительной машины» (ныне известной как “машина Тьюринга”), способной с помощью простейших операций считывания и сдвига выполнять вычисления произвольной сложности и предвосхитившей появление в конце 1940-х гг. универсальных вычислительных машин. В те годы ряд учёных (Дж. фон Нейман, Г. Уолтер, У.Р. Эшби, К. Шеннон и др.) развивали теорию алгоритмов на основе изучения аналогий между нервной системой человека, вычислительными машинами и системами автоматического регулирования. Впоследствии она стала одним из теоретических истоков вычислительной математики, а затем – кибернетики и робототехники.
В 1938 году в мире появился «Электро»: андроид, весивший 120 кг, обладал ростом в два метра, мог ходить, говорить и даже курить. Разработчиком робота был инженер Джозеф Барнет.
Видео робота Электро
В 1942 году у знаменитого писателя-фантаста, американского ученого и популяризатора науки Айзека Азимова, вышел цикл рассказов “Я робот”, в одном из которых он впервые попытался сформулировать основные принципы поведения роботов и их взаимодействия с человеком. Повествование сборника построено в форме интервью с доктором Сьюзен Келвин в 2057 году, в котором она делится воспоминаниями о своей работе на должности штатного робопсихолога мирового лидера в производстве позитронных роботов корпорации «U.S. Robots and Mechanical Men, Inc.»
Общая идея, объединяющая рассказы сборника – разрешение проблем, связанных с роботами, которые можно отнести к столкновению железной логики законов робототехники и человеческого фактора. Эти принципы, впоследствии названные тремя законами робототехники, гласят:
- Робот не может причинить вред человеку или своим бездействием способствовать нанесению ему вреда.
- Он должен исполнять приказы человека, кроме тех, которые противоречат первому закону.
- Робот должен обеспечивать собственную безопасность, кроме тех случаев, когда это противоречит первому и второму законам.
Один из пионеров промышленной робототехники, основатель и президент робототехнической фирмы Unimation Джозеф Ф. Энгельбергер считает, что три закона робототехники А. Азимова являются теми стандартами, которым должны следовать специалисты при создании современных роботов.
В 50-е годы автоматизация и роботизация производства вышли на новый уровень, стали массовыми явлениями.
По определению американского Института Робототехники (RIA), промышленный робот – перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения объектов по заданным траекториям посредством изменяемых программируемых движений. Близко к этому и европейское определение, где под роботами понимаются только универсальные автоматические установки, имеющие не менее трех степеней подвижности, оснащенные различными захватными устройствами и легко перепрограммируемой системой управления.
Именно тогда стали создаваться первые промышленные роботы, осуществлявшие сборку оборудования и простейшие монотонные операции. Для работы с радиоактивными материалами разрабатывались механические манипуляторы, которые копировали движения рук человека, находящегося в безопасном месте. Примером служит разработанная в 1960 году дистанционно управляемая тележка с манипулятором, телекамерой и микрофоном, которую применили для осмотра местности и сбора проб в зонах высокой радиоактивности.
Первого робота-манипулятора разработал изобретатель-самоучка Джордж Девол в 1954 году. Конструкция весила две тонны и управлялась программой, записанной на магнитном барабане. Эта система получила название «Unimate», на устройство был оформлен патент, а затем изобретатель в 1961 году основал компанию «Unimation». Эта система стала применяться для отливки металлических деталей из форм. Захватное устройство работало посредством гидропривода. В том же 1961-м году этой компанией был установлен первый промышленный робот. Его внедрили на заводе General Motors в Нью Джерси на литейном участке. Затем новинка была опробована заводами «Chrysler» и «Ford».

Манипулятор «Unimate»
Этот робот имел пять степеней свободы (о том, что это такое, мы расскажем в следующих статьях) и захватное устройство с двумя «пальцами». Эта машина была эффективнее и быстрее человека. Точность работы была достаточно высока – до 1,25 мм. Уменьшилось количество бракованных деталей.
В 1965 году Ральфом Мошером, инженером компании General Electric, был разработан робот «Walking Truck» для переноски грузов и ряда схожих функций.
Видео Walking Truck робот
С 1967 года промышленные роботы приходят в Европу. Появляются роботы-сварщики и маляры. Посредством видеокамер и датчиков манипуляторы учатся определять габариты изделий и место их расположения.
В 1968 году роботизация начала развиваться и в Японии. Японская компания «Kawasaki Heavy Industries, Ltd.» получила лицензию на производство робота от «Unimation Inc.» и собрала своего первого промышленного робота. Изначально поставки таких роботов были малочисленными и использовались в основном в сварке и распылении.
70-е годы прошли в стремительном развитии робототехники. В 1982 году компанией IBM создаётся первый официальный язык для программирования робототехнических систем. В 1984 году появляется первый робот «Scara» c электроприводом, представленный компанией «Adept».
Если в 1968 году Япония была одним из новичков в производстве и разработке робототехники, то к началу 80-х количество фирм, занимавшихся этой отраслью, увеличилось многократно – с 10 до 175. Если в начале становления производства японцы выпустили примерно 200 роботов, то в 1981 г. – уже 22100 штук.
Всего за период с 1968 по 1981 гг. на японских предприятиях было изготовлено 98800 роботов. В 1982 году парк собственно промышленных роботов в Японии насчитывал около 13 000, в 1984 г. – 65 000, в 1985 г. – 93 000, в 1986 г. – 116 000, а в 1989 г. – 174 000 тыс.! И это без учета не программируемых манипуляторов без жесткого управления. С тех пор Япония начала движение к тому, чтобы стать мировой столицей роботов. К концу 20-го века было около 130 компаний, вовлечённых в производство роботов. К ведущим японским роботостроительным компаниям относятся: «Kawasaki Heuvy Industries», «Hitachi», «Mitsubishi Heavy Industries», «Fujitsu Fanuc», «Aida Engineering», «Matsushita Electric Company», «Yasukawa Electric» и др.
США довольно долго уступали другим странам по парку промышленных роботов в начале 80-х. В 1984 году количество роботов было примерно 13 000, в 1985 – 20 000. Всего в промышленности США с 1981 года использовались 3500 роботов, а в 1989 году — уже более 35 000.
Тогда разработкой роботов занималось около 20 фирм, самыми известными из которых являлись «Cincinnati Milacron» и «Unimation» (которая в начале 80-х была передана концерну «Westinghouse»). Чаще всего промышленных роботов в Штатах внедряли на автомобильном производстве, где их применяли в точечной сварке кузовов. На предприятиях «General Motors» к 1981 году работало уже 270 роботов. Также роботов внедрили «Ford», «Chrysler» и другие компании.
Также темпы индустриализации нарастали и в Западной Европе.
Третьей страной по разработке промышленных роботов и масштабам их внедрения является Федеративная Республика Германия. В 1980 г. насчитывалось 22 фирмы, выпускающих промышленных роботов, а в настоящее время — свыше 90 компаний, поставляющих около 200 различных моделей, но не менее 50% всех применяемых промышленных роботов делят между собой фирмы «ASEA», «Kuka», «Volkswagen».
Парк промышленных роботов в ФРГ в 1980 г. составлял около 1300, в 1984 г. — 6600, в 1986 г. — 12400, а к началу 1988 г. — 14900 единиц, примерно половина из которых использовалась в автомобильной промышленности.
В начале 90-х годов в разработке робототехники произошёл прорыв: появился контроллер с интуитивным интерфейсом управления, которым мог управлять оператор. Он мог изменять параметры работы и регулировать режим. Научно-технический прогресс позволил повысить возможности разработки, «интеллектуальности» и управления роботов. Их функции и надёжность только развивались: увеличивалась сложность, скорость работы, число осей, стали использоваться дополнительные материалы. Также было сделано несколько уверенных шагов к созданию искусственного интеллекта.
Правда, в середине 1990-х наблюдался некоторый спад во внедрении роботов и финансировании крупных проектов. По ряду причин роботизированное оснащение применяли только для автосборочных и некоторых других производств. Стоимость разработок и использования была очень высока, но к 2000 году производство снова стало расти, и увеличивалось на 30% ежегодно.
Ведущими изготовителями роботов в 20 веке были компании «Kawasaki Heuvy Industries», «Hitachi», «Mitsubishi Heavy Industries», «Fujitsu Fanuc», «Yasukawa Electric», «Matsushita Electric Company» (Япония); «Cincinnati Milacron», «Unimation», «GMF Robotics», «IBM» (США); «ASEA» (Швеция); «Volkswagen» и «Kuka» (ФРГ); «Renault» (Франция); «Comau-Fiat» (Италия); «Trallfа» (Норвегия); «GEC» и «Dainichi Sykes» (Великобритания).
Показатели работоспособности роботов ведущих фирм уже тогда стали достигать больших высот: роботы фирм «Unimate», «Versatran», «Kawasaki Unimate», «Trallfa», «ASEA», «Kuka» и др. могли работать без остановок на обслуживание до 500 — 700 часов, их общий срок службы доведен до 40 тысяч часов. Потери, связанные с простоями при ремонте и переналадке, не превышали 2% общего рабочего времени. Все эти факторы приводили к хорошей экономии средств производителей.
Одним из основных направлений научно-технического прогресса мировой промышленности в конце 20 века стало создание гибких производственных систем (точное определение будет дано в следующей статье). Такие системы обеспечили повышение эффективности мелкосерийного и серийного производства. В 1987 г. По всему миру в эксплуатации находились 360-370 ГПС, например, в Японии — 102, США — 66, ФРГ — 40, Великобритании — 36, Италии — 32, Франции — 30, Швеции — 10.
В конце XX века роботизация производств осуществлялась во всех промышленных странах довольно интенсивно. Создавалось и исследовалось совершенствование систем роботов, связанное с их очувствлением и искусственным интеллектом. Основными приоритетами производители обозначили передел мирового рынка, выпуск на рынок товаров лучшего качества с более низкой себестоимостью и с более разнообразным ассортиментом.